


2.对于0V至10V的电压,12000分辨率下其十六进制转换范围为0至1770Hex,对应数字范围为0至6000。而同样在12000分辨率下,十六进制范围扩展为0至2EE0Hex,对应数字范围为0至12000。
3.电流从0mA至20mA时,6000分辨率下其十六进制转换范围是0至1770Hex,对应数字范围为0至6000。在12000分辨率下,这个范围扩展为0至2EE0Hex,对应数字范围为0至12000。
4. 电流在4mA至20mA之间时,其十六进制转换与0mA至20mA时相同。在6000分辨率下为0至1770Hex,对应0至6000的数字范围;在12000分辨率下为0至2EE0Hex,对应0至12000的数字范围。
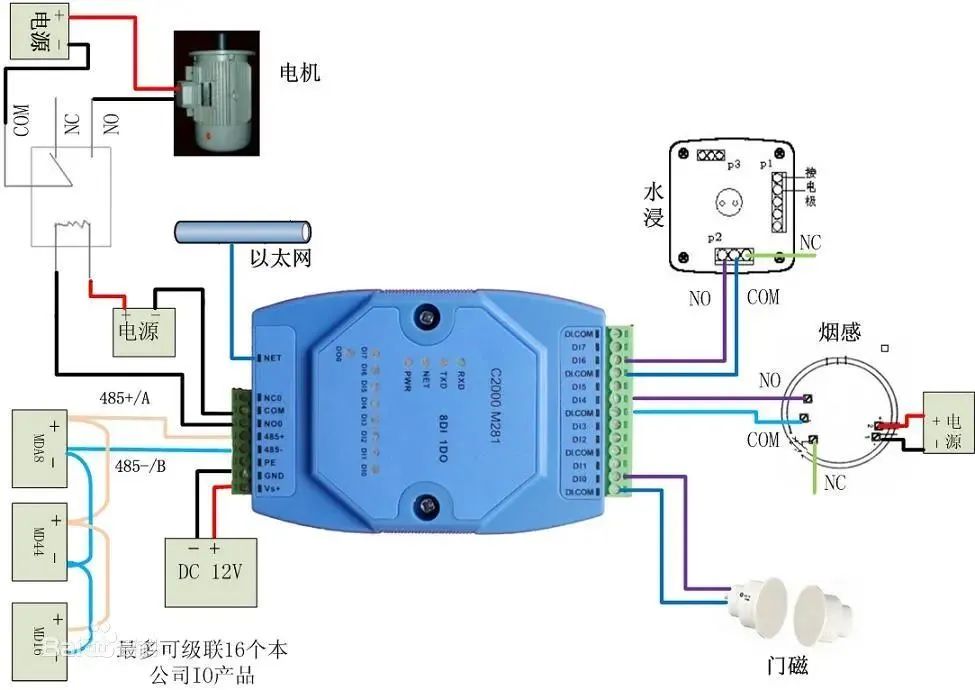
关于模拟输入的配线要求:
1. 推荐使用屏蔽双绞线进行连接,但请确保不连接屏蔽层。
2. 当某个输入不被使用时,建议将VIN和COM端子短接,以避免不必要的干扰。
3. 模拟信号线应与电源线(如AC电源线、高压线等)保持隔离,以减少电磁干扰。
4. 如果电源线上存在干扰,建议在输入部分和电源单元之间安装滤波器,以提高信号质量。
5. 在进行接线时,请确保连接正确。首先给CPU单元上电,然后再给负载上电,以确保系统的稳定运行。
6. 在断电时,建议先切断负载的电源,然后再切断CPU的电源,以避免可能的设备损坏或数据丢失。
· 步进电机的角度控制:
步进电机的角度控制主要依赖于细分数和转一圈所需的总脉冲数。细分数决定了步进电机每一步转动的最小角度,而转一圈所需的总脉冲数则与步进电机的型号和细分数有关。
通过设定目标角度和计算角度百分比,我们可以确定需要发送的脉冲数。具体计算公式为:
角度动作脉冲数 = 一圈总脉冲数 × (设定角度 / 360°)
这个公式将目标角度转换为需要发送的脉冲数,从而实现精确的角度控制。
· 步进电机的距离控制:
步进电机的距离控制需要首先确定滚轮直径并计算滚轮周长。滚轮每转动一圈,步进电机就需要完成一定的脉冲数。因此,我们可以通过滚轮周长和每脉冲转动的距离来计算设定距离所需的脉冲数。具体计算公式为:
设定距离脉冲数 = 设定距离 / [(滚轮直径 × 3.14) / 一圈总脉冲数]
这个公式将目标距离转换为需要发送的脉冲数,从而实现精确的距离控制。
· 步进电机的位置控制:
步进电机的位置控制实际上是角度控制和距离控制的综合。通过控制步进电机转动的角度和距离,我们可以实现对其位置的精确控制。在实际应用中,可能需要结合多种传感器和反馈机制来确保步进电机能够准确地到达指定位置。
原创文章,作者:guozi,如若转载,请注明出处:https://www.sudun.com/ask/79639.html