
私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!
(1)PID基本概述:
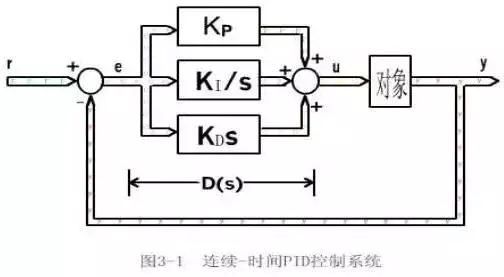
1.PID是一种闭环控制算法。因此,实现PID算法需要硬件闭环控制。这意味着我们需要反馈。例如,控制电机的速度需要一个传感器来测量速度并将结果反馈到控制路径中。下面以速度控制为例进行说明。
2. PID 是比例(P)、积分(I)和微分(D)控制算法。然而,没有必要同时使用这三种算法。也可以仅通过PD、PI 或P 算法进行控制。我对闭环控制最简单的想法之一是P 控制,它反馈当前结果,如果结果为正则减速,如果结果为负则加速。现在我们知道这只是最简单的闭环控制算法。
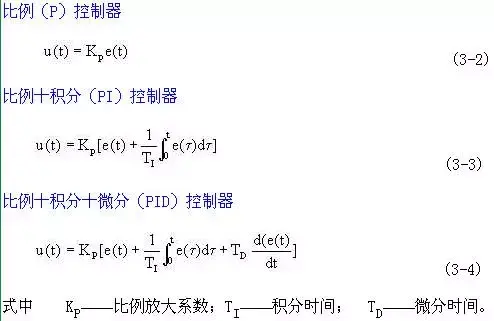
3. 比例(P)、积分(I)、微分(D)控制算法各有特点。
该比率反映了系统e(t) 的基本(当前)偏差。系数越大,调整速度越快,误差越小。但如果该比例太大,则会降低系统的稳定性,甚至可能导致系统变得不稳定。
积分反映了系统的累积偏差,使系统能够消除稳态误差,提高冷漠性。由于存在误差,需进行积分调整,直至误差消除。
导数反映了系统偏差信号e(t)-e(t-1)的变化率,可以在偏差形成前预测偏差变化趋势,产生先进的控制效果。消除Delta 可以提高系统的动态性能。但微分具有放大噪声干扰的作用,增强微分不利于系统的抗干扰能力。
积分或微分都不能单独工作;它们必须与比例控制相结合。
4、控制器P、I、D项选择:根据实际目标系统调试最优PID参数。
(2)常用控制律的特点:
1、比例控制法P:P控制法对输出值作用较快,能更有效地克服不良结果,但不能稳定到理想值。尽管存在干扰的影响,仍会出现残差。适用于控制通道时延较小、负载变化较小、控制要求不高、控制参数在一定范围内允许有余量的情况。例如:水泵房冷热池水位控制、油泵房中心油箱油位控制等。
2、比例积分控制律(PI):比例积分控制律是工程中应用最广泛的控制律。积分可以根据比例消除残余误差。适用于控制通道延迟较小、负载变化较小且控制参数不能容忍残余误差的情况。例如:流量控制系统、油泵房供油管流量控制系统等。
3、比例微分控制律(PD):如果微分项设置得当,微分对控制通道具有主导作用,对提高动态品质因数有很大作用。系统。因此,当控制通道的时间常数或容性延迟较大时,可以采用比例微分控制律来提高系统稳定性,减小动态偏差。加热温度控制、成分控制等请注意,在大的纯磁滞区域中,微分项是无能为力的,并且在测量信号中存在噪声或周期性振荡的系统中,使用微分控制是不合适的。大型窑炉等玻璃液位的管理
4.积分微分控制律(PID)示例:PID控制律可以基于比例引入积分,消除残差,并添加微分效应以提高稳定性。系统。适用于控制通道具有较大时间常数或电容延迟且控制要求较高的情况。温度控制、成分控制等
考虑到D律的作用,我们还需要了解时滞的概念,时滞包括电容时滞和纯时滞。容量滞后通常包括测量滞后和传输滞后。测量迟滞是由于传感元件(例如热电偶、热电阻和在传感过程中必须建立平衡的压力)响应缓慢而引起的迟滞。传输延迟是由传感器、发射器和执行器等设备引起的控制延迟。纯滞后是指测量滞后。 在工业中,大多数纯粹的延迟是由材料传输引起的,例如窑炉玻璃中的液位。从给料机运行到核液位计检测需要时间。
这意味着控制律的选择应根据过程特性和过程要求而定。这并不意味着PID 控制律在所有情况下都能提供更好的控制性能;无论情况如何都使用PID 控制律并不明智。这样做只会增加其他任务的复杂性,并使调整参数变得困难。如果PID 控制器无法满足您的过程要求,您应该考虑其他控制解决方案。串级控制、前馈控制、长延时控制等
5.官方:
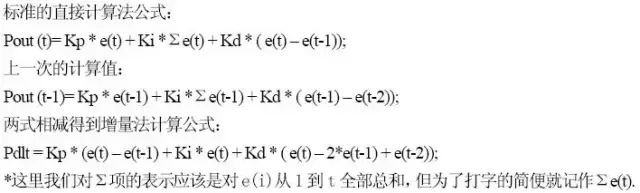
数值PID计算:
6. 问题。 Kp、Ti、Td这三个参数的设置是PID控制算法中的一个重要问题。一般编程时只能设定近似值,系统运行时通过反复调试确定最佳值。因此,处于调试阶段的程序必须能够随时更改并记住这三个参数。
7、参数自整定。一些应用,例如通用设备行业,引入了参数自整定的概念,因为系统中不同的操作对象不允许用户设置参数。本质是在第一次使用一个新的工作对象时,通过N次测量找到一组参数,并记住它们,作为以后工作的基础。
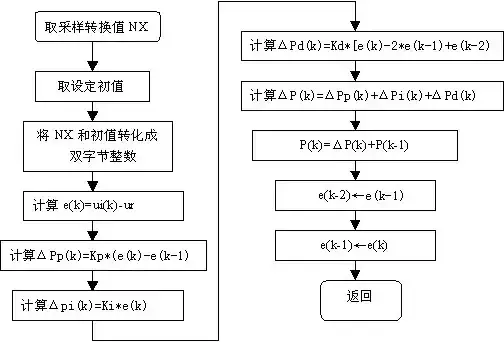
8、PID算法流程图:
私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!
原创文章,作者:小条,如若转载,请注明出处:https://www.sudun.com/ask/84623.html