
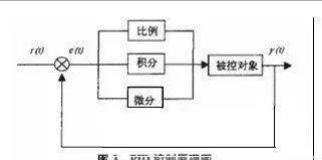
PID控制原理及特点
在工程实践中,应用最广泛的调节器控制规则是比例控制、积分控制和微分控制,也称为PID控制。 PID控制器由于结构简单、稳定性好、运行可靠、调节方便,已经使用了近70年。
在难以采用其他控制理论技术的情况下,例如不能完全理解被控对象的结构和参数或不存在精确的数学模型时,需要依靠经验和现场调试来确定。确定系统控制器的结构和参数。这个时候,应用PID控制技术是最方便的。换句话说,当系统或控制对象不太清楚,或者当没有确定系统参数的有效测量方法时,PID控制技术是理想的。虽然是PID控制,但也有PI控制和PD控制。 PID控制器是利用比例、积分、微分来计算和控制控制量的系统误差。
 1,比例控制(P):
1,比例控制(P):
比例控制是最常用的控制方法之一,例如将加热器的温度控制在恒定的100度,但从目标温度加热到100度。如果你想快速升高温度,当温度超过100度时,通常会使用这样的功能。
e(t)=SP y(t)-
u(t)=e(t)*P
SP——设定值
e(t)—— 错误值
y(t)—— 反馈值
u(t)—— 输出值
P—— 比例系数
对于迟滞性不是很高的被控对象,比例控制方法可以满足控制要求,但很多被控对象都存在迟滞现象。
也就是说,如果设定温度为200度,如果采用比例控制,如果将P设置得比较大,那么即使温度达到200度,输出也变成0,也会出现温度继续上升的情况。当温度超过200度时,又开始下降,但此时输出开始升温,但温度继续下降,例如,直到恒温停止下降并上升。最终整个系统在一定范围内稳定振荡。
当这种振动的幅度可以接受时,例如控制家用电器时,可以选择比例控制。
2、比例积分控制(PI):
积分值的存在是为了改善比例控制的偏差或振荡特性而提出的,它常与比例控制结合使用,即PI控制。
表达式有很多种类型,但大多数情况下标准表达式是:
u(t)=Kp*e(t) + Kie(t) +u0
u(t)—— 输出
Kp—— 比例放大系数
Ki—— 积分放大系数
e(t)—— 错误
u0—— 控制量参考值(基本偏差)
可见,积分项是过去误差的累积值。如果仅使用比例控制,您会发现无法达到设定值或出现振荡。积分项可以用来解决无法解决的问题。定值静态误差问题例如,如果控制存在静态误差,则此时的输出将达不到设定值。积分项的累加值越来越大,并且随着Ki的增大,其在输出中所占的比例越来越大,输出u(t)也越来越大,最终达到消除静态误差的目的。
与PI并用时的调整方法如下。
1、首先将I值设置为0,将P值增大到一个比较大的值。一旦出现稳定的振荡,就降低P值,直到不再振荡或振荡很小(这个术语称为临界)。振荡条件),并且在某些情况下,在某些情况下,还可以在一些P值的基础上增加该值。
2. 增大I 值,直至输出达到设定值。
3. 系统冷却后,重新启动并检查系统是否过冲过多或加热过慢。
通过上面的调试过程可以看出,P值主要可以用来调节系统响应速度,但太大会增加超调和稳定时间,而I值主要可以用来调节系统响应速度。到。减少静态误差。
PID算法
目前控制点包括三种比较简单的PID控制算法:增量算法、位置算法和微分优先级算法。这三种是最简单的基本算法,各有其独特的特点,一般可以满足大多数控制要求。
 1, PID增量算法
1, PID增量算法
离散化公式(注:各符号含义如下):
u(t)—-控制器输出值。
e(t)—-控制器输入与设定值之间的误差。
Kp——比例系数。
Ti——积分时间常数。
Td——微分时间常数。
T———-调节周期。
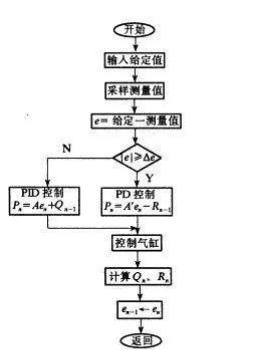
2、整体分离法
离散化公式:
u(t)=q0e(t) + q1e(t-1) + q2e(t-2)
如果|e(t)|
q0=Kp(1+T/Ti+Td/T)
q1=-Kp(1+2Td/T)
q2=Kp Td /T
若|e(t)|
q0=Kp(1+Td/T)
q1=-Kp(1+2Td/T)
q2=Kp Td /T
u(t)=u(t-1) + u(t)
注:各符号含义如下。
u(t)—-控制器输出值。
e(t)—-控制器输入与设定值之间的误差。
Kp——比例系数。
Ti——积分时间常数。
Td——微分时间常数。 (根据位置,可能用“Kd”表示)
T———-调节周期。
——积分分离阈值
3.微分优先PID算法
离散化公式:
u(t)—-控制器输出值。
e(t)—-控制器输入与设定值之间的误差。
Kp——比例系数。
Ti——积分时间常数。
Td——微分时间常数。 (根据位置,可能用“Kd”表示)
T———-调节周期。
——积分分离阈值
PID控制:
由于PI系统中I的存在影响整个控制系统的响应速度,因此我们在控制中添加D导数项来解决这个问题。微分项主要用来解决响应速度的问题。其完整公式为:
u(t)=Kp*e(t) + Kie(t) + Kd[e(t) e(t-1)]+u0
在PID调试过程中,应注意以下步骤:
1. 关闭I 和D。即设置为0。增加P以产生振荡。
2. 减小P,找到临界振动点。
3. 增加I 直至达到目标值。
4、重新接通电源,检查超调、振荡、稳定时间是否符合要求。
5. 针对过冲和振荡情况添加适当的微分项。
6. 请注意,所有调试都必须在最大争用负载下进行调试,以确保调试结果在整个工作范围内有效。
PID控制器参数整定:
PID控制器参数整定是控制系统设计的核心部分。被控过程的特性决定了PID 控制器的比例系数、积分时间和微分时间。
整定PID 控制器参数的方法有很多种,但可以概括为两类。一是利用理论计算的调整方法。控制器参数主要根据系统的数学模型和理论计算确定。该方法计算得到的数据不能直接使用,在实际工程中需要进行调整和修正。第二种方法是工程调整。这主要依靠工程经验并在直接控制系统测试中进行。该方法简单易学,在工程实践中得到广泛应用。
PID控制器的参数工程整定方法主要有临界比例法、响应曲线法、阻尼法等。三种方法各有特点,但共同点是通过测试并利用工程经验公式来整定控制器参数。但无论采用哪种方式获取控制器参数,最终都需要在实际运行过程中进行调整和改进。目前常用的是临界比法。使用这种方法,
请按照以下步骤调整PID 控制器参数:
(1) 首先,我们预先选择一个足够短的采样周期以使系统能够工作。
(2) 仅添加比例控制环节,直到系统根据输入步长出现临界振荡,并记录此时的比例放大系数和临界振荡周期。
(3) 该方程用于计算某种控制程度下PID 控制器的参数。
原创文章,作者:小条,如若转载,请注明出处:https://www.sudun.com/ask/84628.html