
说到PWM,很多电源工程师在工作中都会遇到各种各样的问题。事实上,只有找到问题的根本原因,才能采取适当的治疗措施。这里有一些不错的文章供大家学习~
基于DSP技术的三相逆变电源之SPWM原理简析
DSP技术芯片的问世,极大地提高了开关电源的研发和设计思路,给工程师的研发工作带来了诸多便利。在今天和明天的解决方案分享中,我们将分享基于DSP技术的三相逆变电源设计方案。今天的分享中,我们首先简单介绍并分析一下这款三相逆变电源的SPWM调制原理。
该逆变电路基于DSP技术设计,主要采用美国TI公司生产的DSP芯片TMS320LF2407A为核心部分。确定DSP技术芯片的核心控制理念后,可以基于数字控制思想构建通用的变流器系统平台。该转换器平台硬件通用性强,不仅适用于500W三相逆变电源,而且只需更改软件即可满足不同输出性能要求的逆变器的要求。该方案的设计指标为输入电压220V(交流)、输出电压110V(交流)、频率50Hz、输出功率500W、输出电流4.5A、输出总谐波系数(THD)2%。系统示意图如下图1所示。
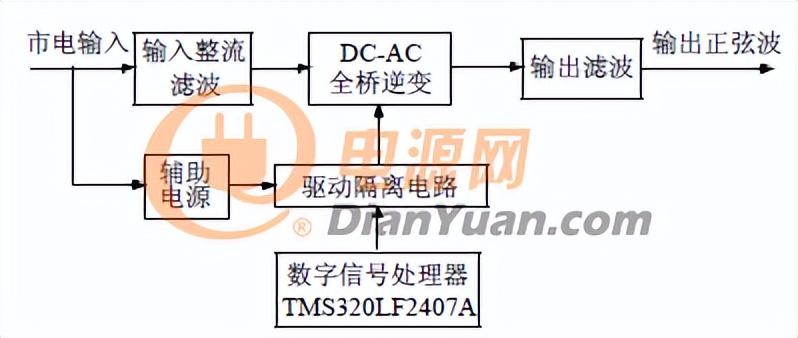 图1基于DSP技术的三相逆变电源系统原理图
图1基于DSP技术的三相逆变电源系统原理图
系统组件
从图1所示的系统框图来看,整个基于DSP技术芯片开发的三相逆变电源系统由输入整流滤波、全桥逆变、输出滤波、驱动隔离、数字控制器和辅助电路I组成。了解这个。由电源等组成。其中,基于DSP技术的数字控制器主要为电源电路中的真空管的开关提供栅极驱动数字信号。
在整个三相逆变电源系统中,基于控制指令的比较和综合,通过一定的调节规律和调节方法,得到特定的驱动信号。数字控制器DSP还包括时序控制等。驱动隔离部分主要向主电源电路的开关管提供驱动模拟信号。换句话说,它通过电位分离和功率放大在数字和模拟信号之间建立了一座桥梁。辅助电源主要向控制电路和驱动电路提供驱动电源和控制电源。输入整流部分完成ACDC转换,逆变桥部分完成DC-AC转换。
SPWM调制原理
了解了这个基于DSP技术设计的三相逆变电源系统的配置后,我们来看看SPWM调制原理。抽样控制理论有重要的结论。我想这是很多工程师都很明白的事情。也就是说,如果将相同冲量但不同形状的窄脉冲应用于具有惯性的连杆,则基本效果是相同的。这一结论为PWM控制提供了重要的理论依据。
在该方法中,我们所设计的三相逆变电源主系统中产生脉宽调制波的基本方法也是基于上述采样控制理论而设计的。我们选择将正弦波的每个半周期分成相等的部分,并将每个划分的正弦曲线和水平轴所包围的区域替换为高度等于该区域的等方脉冲。那么每个脉冲的宽度为:它按照正弦波规律变化。通常选择正弦波作为调制波,高频等腰三角形作为载波,它们的交集形成正弦脉冲调制(SPWM)。在该三相逆变电源系统中,产生SPWM波的步骤如下:
首先,载波频率为20kHz,这意味着载波周期为50秒。此时使用通用定时器T1的周期中断T1PINT作为载波周期中断。此时,T1的定时器周期对应于载波周期。此时,将T1计数模式设置为连续增减模式,并将CPU时钟频率设置为40MHz。同时设置T1CON的缩放因子为4,即4。 T1的输出频率为10MHz,计数周期为100ns。
一旦设计好T1技术模式和CPU时钟频率,就需要根据占空比公式计算每个方波脉冲的占空比,并将占空比乘以周期寄存器中的值。比较寄存器。设定值并将脉冲数指针加1。上述操作完成后,下一步是将周期中断子程序计算出的比较寄存器的值发送到比较寄存器,并设置相应的标志位。主程序根据标志位判断循环操作是否完成,如果标志位为1则清零,并调用占空比计算子程序。不设置为1,则直接进入待机状态。
原文链接:https://www.dianyuan.com/article/33046.html
对比讲解 PWM与可控硅调光哪个更好?
LED照明领域有不同类型的调光技术,最常用的两种调光方式是晶闸管调光和PWM调光。那么这两种调光方式有什么区别呢?各自的优缺点是什么?本文将帮助您对这个问题进行全面的分析,以了解这两种调光方式的区别。
Triac调光是物理调光,而PWM调光是脉冲调光。调光原理有根本的区别。可控调光可以用常规调光器来完成,但PWM调光必须用专用调光器来实现。因此,PWM的成本比较高。您可以使用自己的晶闸管,但对于100 多个灯,您将需要使用PWM。
PWM的优点之一是从处理器到受控系统的信号都是数字形式,不需要数模转换。保持信号为数字格式可以最大限度地减少噪声的影响。仅当噪声足够强以将逻辑1 变为逻辑0 或将逻辑0 变为逻辑1 时,噪声才会影响数字信号。提高抗噪声能力是PWM 相对于模拟控制的另一个优势,也是PWM 有时用于通信的主要原因。通过从模拟信号转换为PWM 信号,可以显着延长通信距离。在接收端,调制后的高频方波通过合适的RC 或LC 网络进行滤波,将信号恢复为模拟形式。 PWM 经济、节省空间且具有很强的抗噪声能力,使其成为许多设计应用中值得工程师使用的有效技术,但其成本相对较高。
从目前LED照明领域的发展来看,目前最流行的调光技术是晶闸管调光。不过,虽然这项技术受到了广泛关注,但它并不像PWM 调光那么成熟。此时,PWM调光技术更加稳定,不存在频闪问题。最终的选择还是应该以设计者自身的需求为主要考虑……
原文链接:https://www.dianyuan.com/article/33008.html
基于ne555的史上最简单SPWM改进电路
SPWM 具有精度高、输出正弦波形好等特点。大多数SPWM 在其设计中使用微控制器。选择正确的微控制器可以使整体设计变得简单高效。在这篇文章中,小编将介绍一个基于ne555的简单SPWM改进电路。该电路最重要的特点是其简单性,这使得它非常适合首次使用微控制器的设计人员。
这种设计的优点:
1. 非常适合初学者,可能是有史以来最简单的SPWM 电路。
2、采用单电源、宽电压供电(10V-30V)。
3. 输出最大占空比较高,仿真时最大占空比接近100%。这导致更高的总线电压利用率。 340V 的总线电压足以产生线路频率为230V 的正弦交流电。
4、输出隔离,外围电路干扰少。
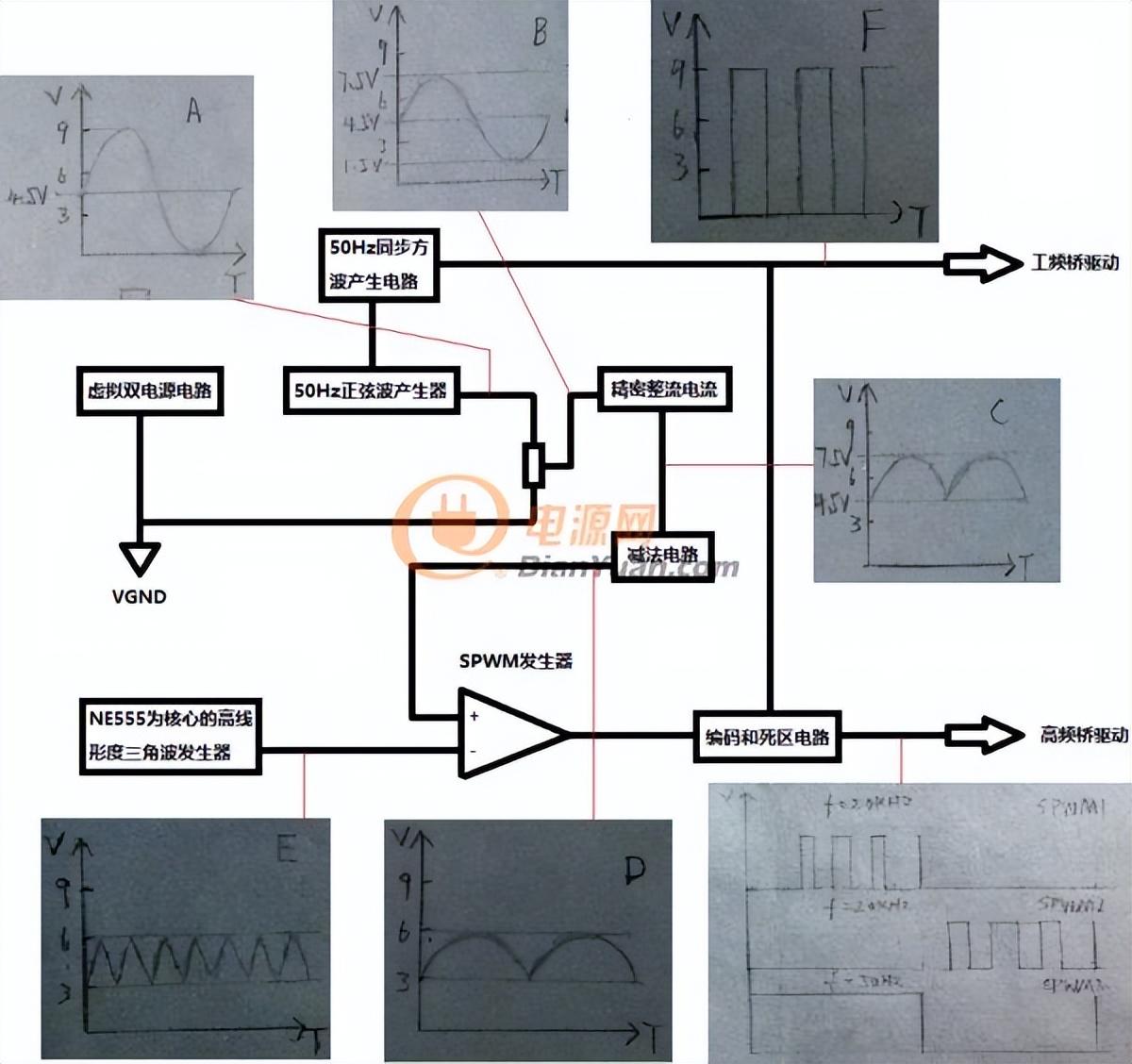 图1 系统框图
图1 系统框图
需要注意的是,该电路设计没有稳压反馈,因此稳压功能完全在第一级完成。前级一般由SG3525或TL494组成,要充分发挥稳压功能。由于它采用虚拟双电源,因此可以省略辅助电源变压器,而可以使用单电源。我们看一下驱动板原理图。
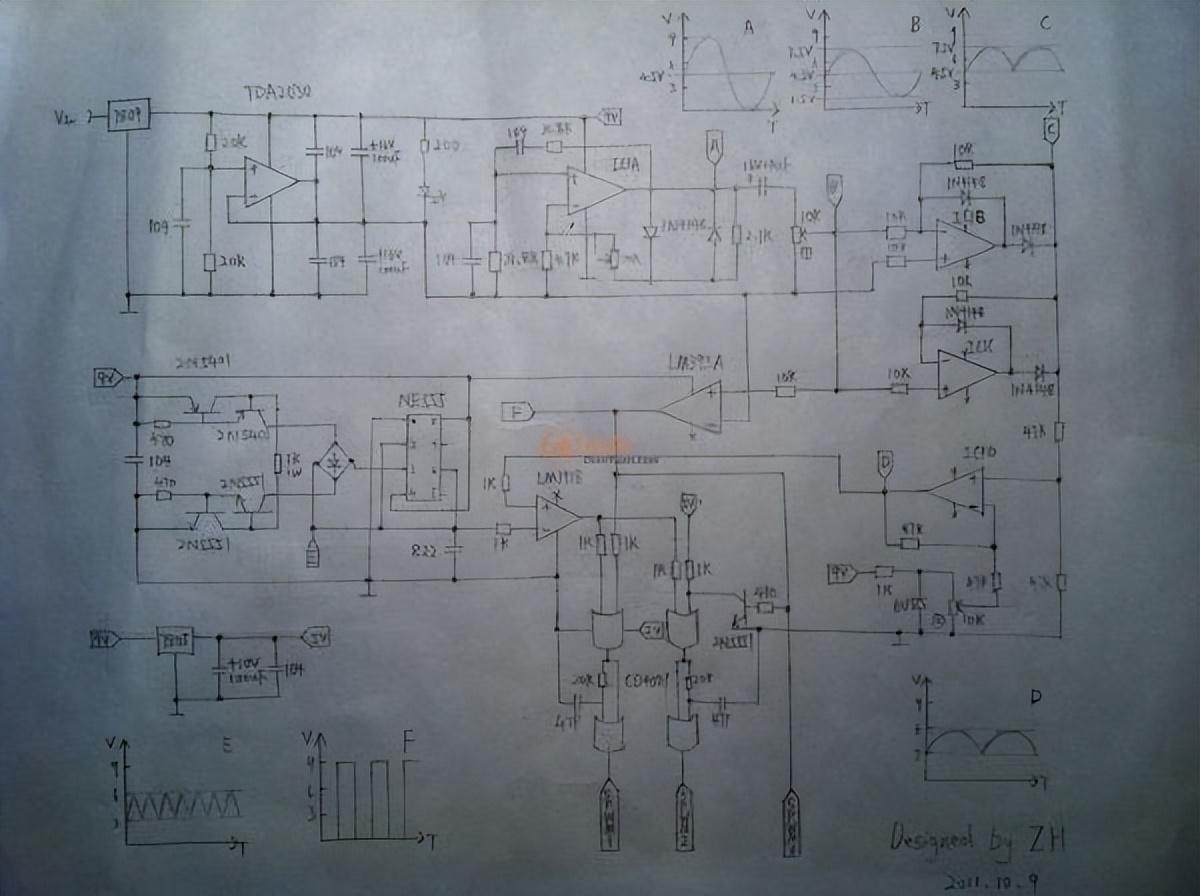 图2
图2
如图2所示,LM7809将电池电压降低至稳定的9V,允许电路在较宽的电源范围(10V至30V)下工作,形成内核的虚拟双电源,并将正极9V连接到转换为正电源。双电源-4.5V。 NE555和周围元件组成一个高度线性的三角波振荡器,频率约为20KHz。在NE555 的引脚2 和6 处,我们得到一个在3V 和6V 之间移动的三角波。
IC1与LM324、IC1A及外围元件组成50Hz工频正弦波振荡器,产生4.5V幅值的正弦波(用于生成虚地)。圆圈中的电位器将这个正弦波的幅度分为3.5V。 IC1B、IC1C及外围元件组成高精度整流电路,将正弦波变换为幅度为3V的蒸汽波。有必要对比NE555的蒸汽波和三角波。三角波和蒸汽波的幅度相同3V,但蒸汽波的最低电位高1.5V。不仅仅是三角波.
原文链接:https://www.dianyuan.com/article/31591.html
牛人有高招 轻松搞定PWM波占空比测量
占空比是一个非常重要的参数,直接关系到PWM波形的控制精度,也是工程师在实际操作中需要特别关注的参数项。那么,设计人员和开发人员应该使用什么方法来准确测量PWM 波的占空比?以下是一些可以使专业人士更轻松地进行测量过程的方法。
这里我们以NI数据采集板为例介绍三种PWM波占空比测量解决方案。让我们仔细看看这四种解决方案的工作原理。
用计数器测量
在进行占空比测量时,最简单的解决方案是使用计数器在半个周期内完成测量。在实际工作中,支持的计数器必须具有双边沿分离检测功能。通常,32 位宽计数器支持此测量。该解决方案允许您预设半周期时间以获得非常准确的测量结果。在NI的采集板类型中,cDAQ 9174和9178有四个计数器,每个插槽都有可用的计数器资源,而cDAQ-9172只有第5和6个插槽有可用的计数器资源。对于具有两个24 位计数器的板,这些类型的板通常没有双边沿分离检测。工程师可以使用脉冲宽度测量来分别测量高脉冲宽度时间和低脉冲宽度时间,并计算占空比。
 图1 测量占空比的计数器
图1 测量占空比的计数器
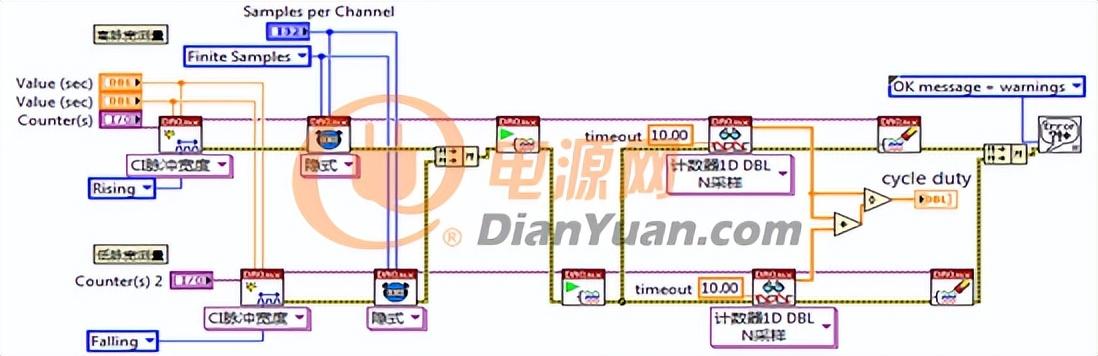 图2 测量占空比的两个计数器
图2 测量占空比的两个计数器
使用模拟采集测量
除了使用计数器完成占空比测量外,工程师还可以使用模拟采集来完成测量任务。该解决方案主要使用波形测量选板中的脉冲测量VI,它允许您根据定期收集的数据计算占空比。模拟采集需要足够高的采样率(超过脉冲频率的5到10倍,具体取决于占空比)以获得足够的波形信息,从而提高占空比测量精度。这种通过软件计算占空比的方法提供了相对平均的处理速度。
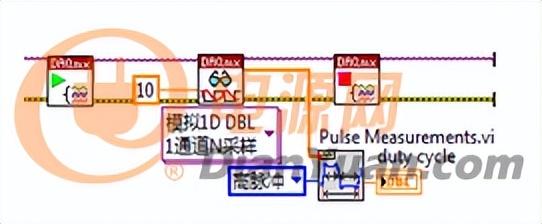 图3 模拟采集测量占空比
图3 模拟采集测量占空比
使用FPGA 完成测量
为了测量PWM波的占空比,工程师还可以使用FPGA来完成测量任务。 FPGA具有精确的40MHz时钟计数器资源,可以计算PWM波的脉宽和周期,并通过记录信号边沿变化时刻的计数器值来计算占空比。图4所示的程序是FPGA占空比测量程序。如果实际调用的话,Digital In可以用模块IO代替。
原文链接:https://www.dianyuan.com/article/31589.html
移相全桥PWM ZVS DC-DC变换器运行缺陷简析
移相全桥PWM ZVS DC-DC转换器由于其高效率和高稳定性的优点,目前广泛应用于汽车、通信和太阳能发电变电站系统,并逐渐变得与众不同。业界新的流行应用。然而,尽管相移全桥PWM ZVS 转换器具有所有优点,但也有一些难以克服的缺点。本文简要总结并分析了此类转换器的缺点。
在实际应用中,移相全桥PWM转换器的最大缺点之一是在轻负载下难以实现ZVS。这是因为该变换器前臂和后臂开关管实现ZVS的条件不同。为了使两个桥臂上的开关管实现ZVS,必须将相应并联谐振电容的能量释放为零,使二极管自然导通。在第一桥臂中,在T2导通之前的t01时段,放电电流ip较大且恒定。另一方面,由于变压器原副边之间进行能量交换,原边等效电路的电感L=Lr+K2Lf变得非常大,用于实现前臂开关ZVS的能量也变得非常大。在t23期间直到延迟桥臂T3导通时,ip逐渐减小,同时二极管D5和D6同时导通,使变压器次级短路。原副边之间没有能量传递,等效电感的大小只有Lr,因此滞后桥臂开关管实现ZVS所需的电感能量较小,而滞后桥臂开关管却很难实现ZVS。实现ZVS。滞后桥臂实现ZVS的条件如下:
在此等式中,I2 是时间t2 时的初级电流值。从该方程的计算和推导可知,轻负载时,电流I2较小,因此滞后桥臂很难实现ZVS。
此外,相移全桥PWM 转换器的实际实施还存在其他缺点。也就是说,输入电压与转换器的转换效率之间的矛盾是不可调和的。假设输入电压可以输出满载电压,当输入电压Vin较低时,占空比较大,初级循环能量较小,变换器效率较高。当输入电压Vin较高时,占空比较小,初级循环能量较大,变换器效率较低。为了实现更高的效率,相移全桥PWM ZVS DC-DC 转换器通常设计为在低输入电压和高占空比下运行。当输入电压出现故障时,负载能量仅由直流母线电容提供,输入电压在短时间内迅速下降。此时,需要较大的占空比来维持恒定的输出电压,电路失去过冲能力,输出电压迅速下降。
原文链接:https://www.dianyuan.com/article/31116.html
移相全桥PWM ZVS DC-DC变换器工作阶段简析
移相全桥PWM ZVS DC-DC转换器具有相对简单的拓扑结构、低功耗和高效率的特点,使其在工业制造领域和光伏变电站系统中特别受欢迎。由于其工作原理和结构的原因,此类变流器在日常运行中具有六个不同的运行阶段。本文对该变换器的六个工作阶段进行了简要分析和总结。
在分析此类变换器的六个工作阶段之前,我们首先看一下这种移相全桥结构变换器的工作波形。波形如下图所示。
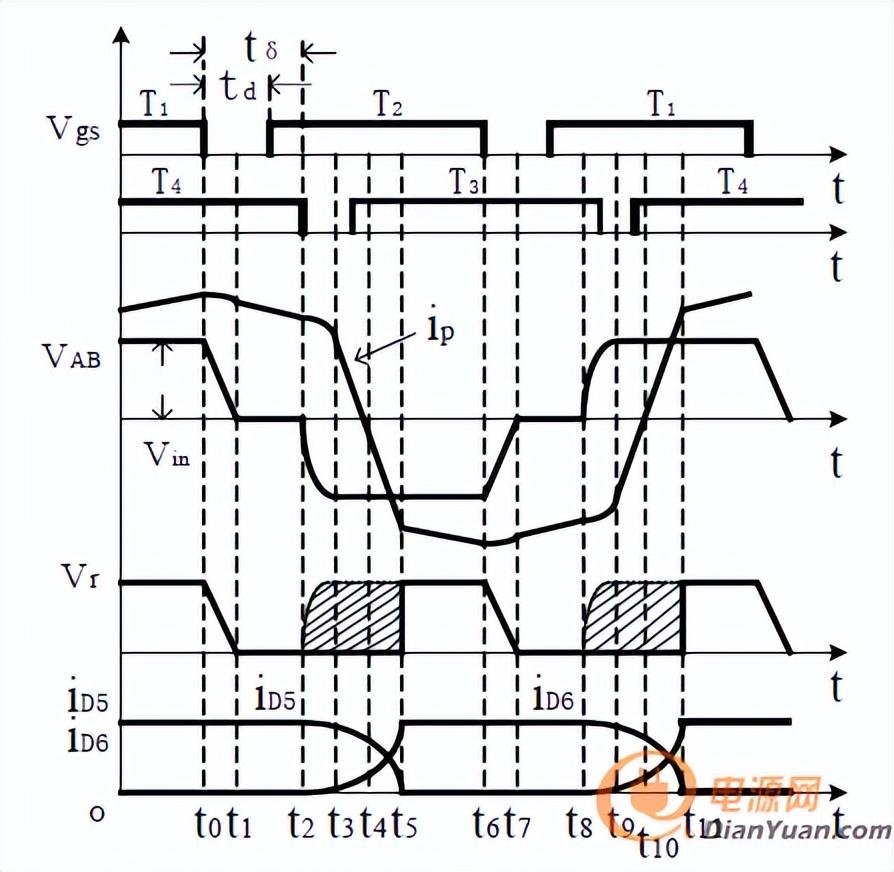 图为移相全桥PWM ZVS DC-DC转换器的工作波形
图为移相全桥PWM ZVS DC-DC转换器的工作波形
下面我们开始对六个不同阶段的工作分别进行分析和总结。
移相全桥变换器的第一个工作阶段在t0时刻关断T1,电流ip从T1转移到C1,C2分支对C1充电,C2放电。这是一个完整的工作阶段。在此期间,谐振电感Lr和滤波电感Lf串联,可以认为Lf没有明显变化,类似于恒流源。电容器C1 上的电压从零开始线性增加,电容器C2 上的电压从Vin 开始线性减小。在t1时刻,C2上的电压降至零,T2的反并联二极管D2自然导通,钳位T2上的电压。潜力为零。
在转换器的第二个工作阶段,波形图清楚地表明,t1时刻T2处的电压被钳位至零电位,并且T4导通。此时,VAB=0。然后ip通过T4、D2、Lr续流,ip下降,其感应电压导通变压器次级二极管D5,使If续流。在该回流阶段,只要满足t01=t1-t0,D2就导通。
移相全桥变换器的第三工作阶段是在时间t2,此时T4关断并且初级电流ip传输到C3和C4。另一方面,C3上的电荷被去除,Vc3下降。来自维恩.与此同时,C4充电,Vc4从零逐渐上升,T4软关断。在此操作阶段,变压器的次级二极管D6 导通。由于滤波电感电流If几乎恒定,变压器次级侧的整流二极管D5和D6之间发生换流。由于D5和D6同时导通,变压器次级侧短路。电路化。
接下来,我们进入转换器的第四工作阶段。从其工作波形可以看出,在t3时刻,C4上的电压充电至Vin,C3上的电压变为零,二极管D3自然导通,导致Vc3=0。在第四工作阶段,只要t23=t3-t2。
在移相全桥变换器的第五个工作阶段,ID6仍然不足以提供If,所以上图中的波形趋势表明,ip在t4过零并反向增加。 D5、D6同时保持导通,次级电压为零.
原文链接:https://www.dianyuan.com/article/31103.html
还有很多值得一看的地方。查看更多精彩文章https://www.dianyuan.com/eestar/
更多好玩内容
这就是回扣的全部内容。
Flyback 如果你不明白这个,请过来了解一下。
如果你想快速学习EMC,收集以下六篇文章就足够了。
即使读完这8篇文章,还是很难理解PWM。
PWM就是PWM,但你还在为PWM发愁吗?
原创文章,作者:小条,如若转载,请注明出处:https://www.sudun.com/ask/84725.html